
Underwater Ingenuity
Solving your toughest underwater challenges with uncompromising safety, operational efficiency, advanced underwater robotics, and highly skilled personnel – worldwide.
Phoenix International Holdings, Inc. is an Employee-Owned Company

What We Do …
Phoenix International Holdings, Inc. delivers specialized capabilities across a broad range of marine services, including deep ocean search and recovery; engineering; inland/infrastructure diving; offshore IRM; offshore wind farm support; seabed survey; ship repair and maintenance; and submarine rescue.

Assets & Capabilities …
Phoenix International Holdings, Inc. is a marine services contractor providing manned and unmanned underwater solutions, design engineering, and project management services to a diverse set of clients worldwide.

Careers …
If you’re passionate about the marine industry, enjoy traveling to locations across the U.S. and around the world, and thrive on working on cutting-edge technology, Phoenix International Holdings, Inc. could be the perfect fit for you.
Clients Served
Operating from eight regional support facilities on the East, Gulf, and West Coasts of the United States, Phoenix International Holdings, Inc. (Phoenix) provides a full range of underwater services to commercial and military customers alike. Our extensive portfolio of underwater capabilities includes surface supplied and one atmospheric system diving; Remotely Operated Vehicle (ROV) and Autonomous Underwater Vehicle (AUV) operations; and pressurized submarine rescue system design, fabrication, and deployment. Additionally, Phoenix maintains robust in-house engineering and project management capabilities that supports all our service lines.


Latest News Releases

Phoenix Designed and Built Curv 7 ROV Completes First Project for the Navy
Largo, MD-7/13/26 Phoenix International is pleased to announce that the [...]
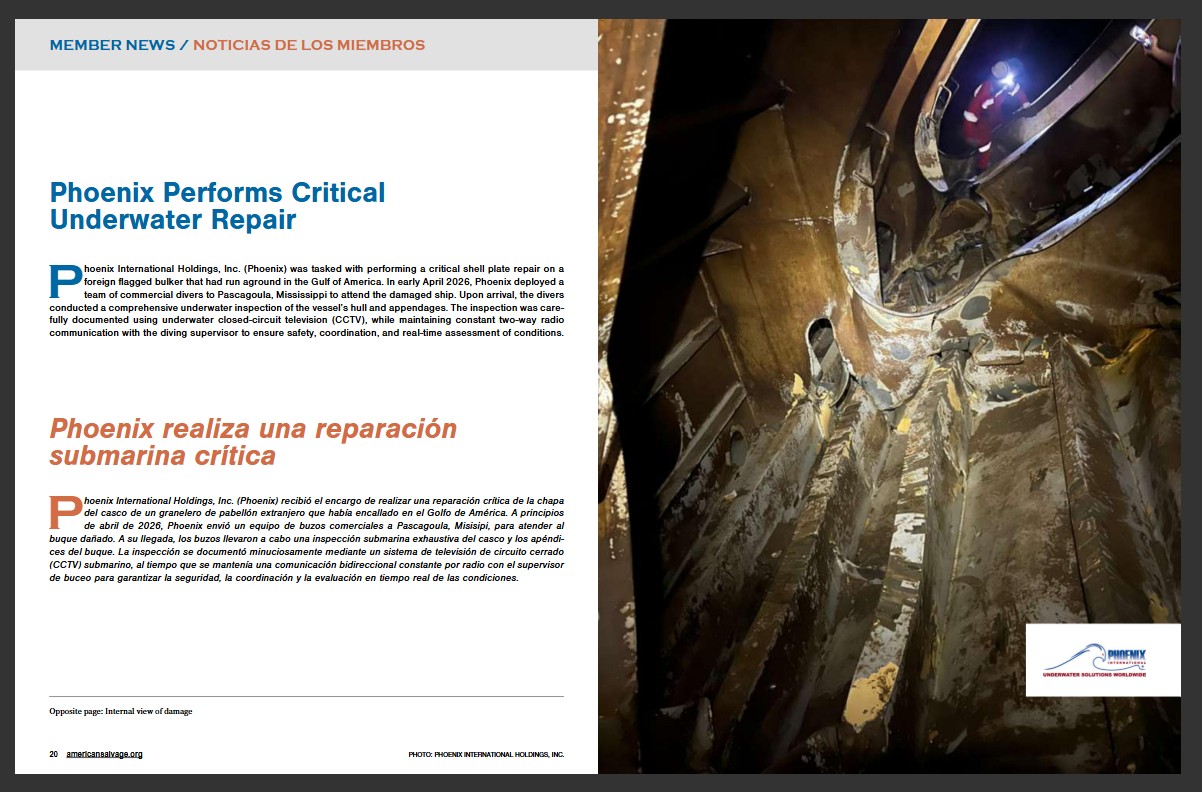
Phoenix Completes Emergency Underwater Hull Repair Following Vessel Grounding
Pascagoula, Mississippi-June 23, 2026 Phoenix International Holdings, Inc. announces the [...]
Phoenix Features in Spring Edition of Soundings Magazine
Phoenix is pleased to be featured in the spring edition [...]

Let’s Get Started
Contact us today to put Phoenix to work on your next underwater project.